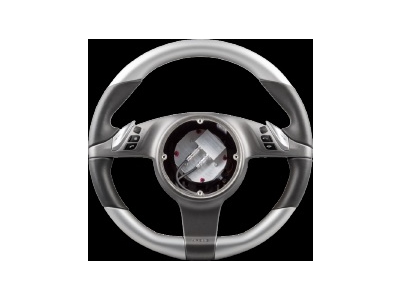
Besides the parameters torque, steering angle and rotational velocity, the sensor optionally also acquires accelerations in the center of the steering column (x-, y-and z direction) as well as rotational acceleration. Measurement data are digitized for a highly fail-safe data transfer, with a resolution of 16 bits (internally: 24 bits). Precision of torque measurement is 0.1% FS. Contactless power supply by induction.
For data output, the receiver and control unit offers both analog and digital interfaces (CAN, Ethernet). At the OLED display integrated in the control unit, all measurement values are displayed in physical dimensions. Autozero of torque and angle is triggered directly at the control unit or by remote control.